


Мобильный робот манипулятор STAR
Артикул: STAR-S / STAR-L / STAR-M / STAR-H
Ключевые подсистемы: коллаборативный робот Elfin, мобильная платформа HR AGV
Мобильный робот манипулятор
 Мобильный робот STAR — это интеллектуальный, гибкий и экономически эффективный робот, предназначенный для выполнения широкого спектра задач в различных отраслях промышленности. Он оснащен мобильным шасси и многофункциональным манипулятором, который позволяет ему выполнять такие операции, как перемещение, сборка, обнаружение и другие технологические процессы.
Мобильный робот STAR — это интеллектуальный, гибкий и экономически эффективный робот, предназначенный для выполнения широкого спектра задач в различных отраслях промышленности. Он оснащен мобильным шасси и многофункциональным манипулятором, который позволяет ему выполнять такие операции, как перемещение, сборка, обнаружение и другие технологические процессы.
Система STAR состоит из независимых модулей, что обеспечивает ее высокую масштабируемость и адаптивность к различным требованиям заказчиков. Роботы STAR могут быть интегрированы в существующие системы клиентов, такие как MES или системы диспетчеризации, для оптимизации производственных процессов.
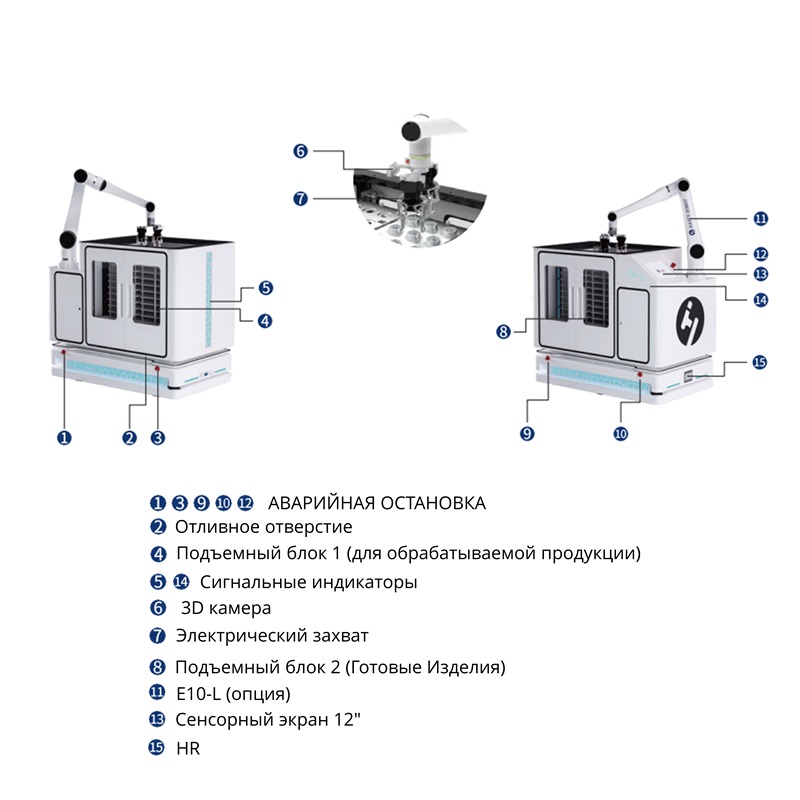
Роботы манипуляторы серии способны автоматически захватывать объекты, обрабатывать, транспортировать заготовки благодаря системе технического зрения, захвату с регулированием усилия и иным компонентам. Робот STAR предлагает разные способы навигации, а также поддерживает обратную связь по крутящему моменту, что обеспечивает остановку при обнаружении препятствий.
Новое поколение роботов STAR ориентировано на индустрию 4.0 и может быть использовано в различных отраслях, включая электронику, металлообработку, автомобильную промышленность, энергетику, кораблестроение, аэрокосмическую отрасль, здравоохранение, услуги для семей и управление документами.
Основные преимущества мобильного робота STAR включают высокую экономическую эффективность, гибкость и масштабируемость, а также возможность интеграции в различные системы и приложения. Это делает устройство идеальным решением для предприятий, стремящихся оптимизировать свои производственные процессы и адаптироваться к изменяющимся требованиям рынка.
Преимущества:
- Интеллектуальное управление: Star Robot использует интеллектуальное управление для обеспечения эффективности и стабильности работы.
- Высокая масштабируемость: Роботы Star могут легко интегрироваться с другими системами, такими как MES и WMS, для расширения функциональности.
- Стабильная производительность: Самостоятельная разработка алгоритмов и компонентов обеспечивает стабильность работы робота.
- Автоматический подъем: Все материалы внутри робота перемещаются автоматически, что улучшает эффективность использования пространства.
- Быстрый запуск: Благодаря технологии навигации SLAM, робот может быстро создать маршрутную карту и спланировать свою работу.
- Контроль состояния: Манипулятор имеет возможность в реальном времени сообщать о своем аппаратном и рабочем статусе, что упрощает диагностику и обслуживание.
- Автоматическая зарядка: Star Robot может автоматически возвращаться на зарядную станцию для подзарядки, увеличивая продолжительность работы.
Технические характеристики
| Характеристики | Модель | STAR-S | STAR-L | STAR-M | STAR-H |
| Основной корпус | Мобильный робот | HR-150 | HR-300 | HR-600 | HR-1200 |
| Манипулятор | E03/E05 | E03/E05/E05-L/E10 | E05-L/E10/E10-L/E15 | E05-L/E10/E10-L/E15 | |
| Базовые параметры | Размеры (без Elfin) | 700x500x630 мм | 950x650x900 мм | 1200x700x900 мм | 1530x965x1300 мм |
| Тип привода | Дифференциальный привод | Дифференциальный привод | Рулевое колесо | Дифференциальный привод | |
| Подъёмные блоки (опция) | Настраиваемый | ||||
| Рабочие параметры | Максимальная скорость перемещения | 1.5 м/с | 1.5 м/с | 1.1 м/с | 1.5 м/с |
| Режим навигации | Лазерный SLAM, гибридная навигация (Fusion Vision) — опция | ||||
| Техническое зрение | Система (Стандарт) | Камера (настраиваемая) | |||
| Точность позиционирования | ±0.5 мм | ||||
| ПО | Программное обеспечение | ПО робота/диспетчерское ПО (опция) | |||
| Платформа разработки | Windows/Linux | ||||
| Характеристики аккумулятора | Напряжение | 48 В | |||
| Время работы (с нагрузкой) | > 6 ч | 10 ч | 12 ч | 12 ч | |
| Время зарядки | ≤ 2 часов | ≤ 2 часов | ≤ 2 часов | Ручная зарядка ≤ 2.5 часов | |
| Внешние интерфейсы | Стандартный интерфейс связи | TCP/IP, HTTP, SDK | |||