
Промышленный робот BRTIRXZ0805A шарнирный
Артикул: BRTIRXZ0805A
6 осей. до 5 кг. для сборки, упаковки, загрузки/разгрузки, литье
BRTIRXZ0805A — коллаборативный робот
Промышленный робот BRTIRXZ0805A — шестиосевой коллаборативный робот (кобот) с функцией обучения волочению. Максимальная длина руки составляет 870 мм, грузоподъемность — до 5 килограммов. Робот оснащен функциями обнаружения столкновений, трехмерной визуальной идентификации и воспроизведения траектории, отличается такими характеристиками, как безопасность, эффективность, интеллектуальность, гибкость, легкость, доступность, надежность и низкое энергопотребление.
Промышленный кобот может быть использован в сложных гибких производственных линиях для упаковки продукции, а также в операциях литья под давлением, включая задачи погрузки/разгрузки в дополнение к сборочным операциям.
Особенности BRTIRXZ0805A
- Более безопасное взаимодействие человека и машины благодаря встроенному датчику крутящего момента и функции обнаружения столкновений.
- Обучение перетаскиванию, возможность программирования, простое и удобное управление.
- Портативная и простая конструкция: облегченный дизайн, собственный вес робота оставляет менее 26 кг, встроенный высокоинтегрированный модуль значительно упрощает внутреннюю структуру корпуса, облегчает разборку и сборку кобота.
- Экономичность и высокая эффективность в эксплуатации. Максимальная скорость в работе может достигать 2,0 м/с, обеспечивая непревзойденную гибкость и динамичность.
- Широкий спектр применения: упаковка, литье под давлением, погрузочно-разгрузочные работы, сборка и другие отрасли промышленности.
ХАРАКТЕРИСТИКИ
- Тип: шарнирный, коллаборативный
- Степень подвижности: 6 осей
- Сборка: напольный
- Применение: для сборки, нагнетания под давлением, для упаковки, загрузки, разгрузки
- Уровень защиты: IP54
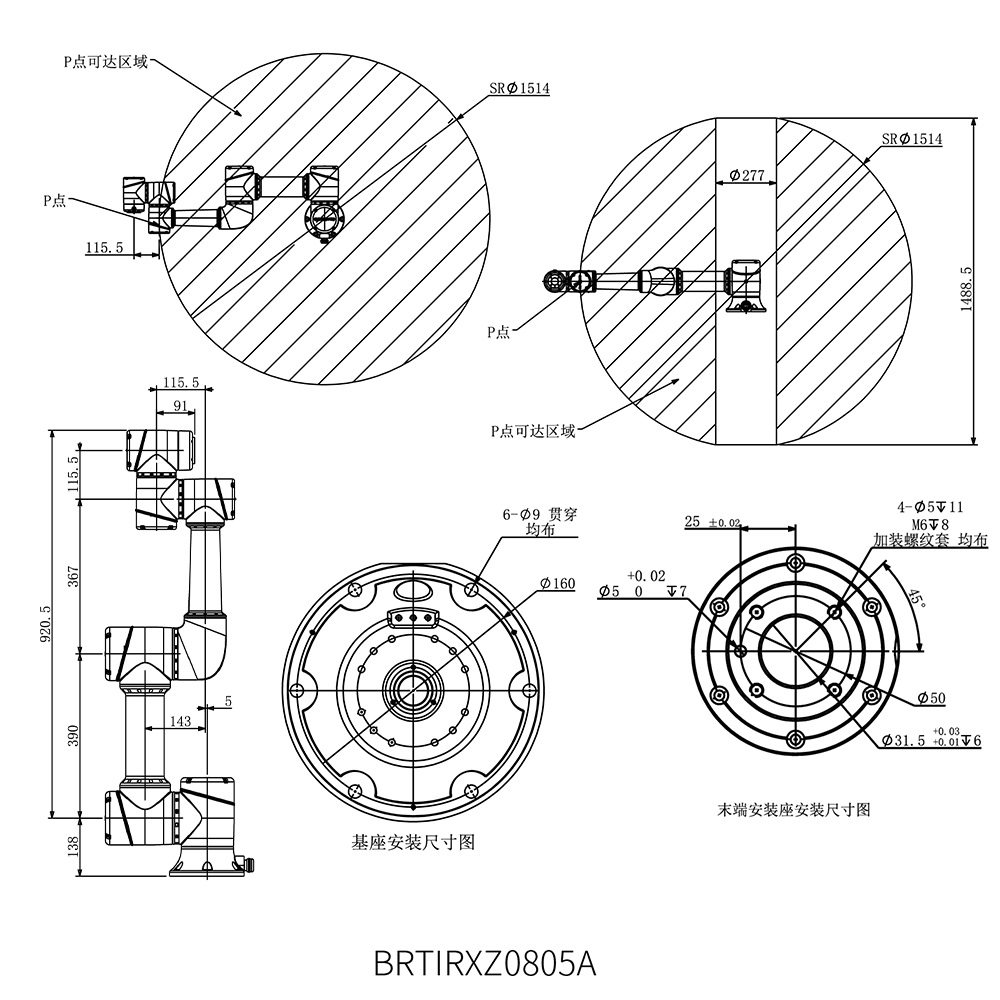
- Длина руки: 870 мм
- Повторяемость: ±0,03 мм
- Грузоподъемность: 5 кг
- Коммуникационный интерфейс: Ether Cat, Ethernet, RS485
- Вес: 26 кг
ЧЕРТЕЖ

|
Параметр |
Ось |
Значение |
| Диапазон
перемещения |
J1 | -180°~+180° |
| J2 | -160°~+160° | |
| J3 | -65°~+250° | |
| J4 | -180°~+180° | |
| J5 | -180°~+180° | |
| J6 | -360°~+360° | |
| Максимальная
скорость |
J1 | 120°/с |
| J2 | 120°/с | |
| J3 | 120°/с | |
| J4 | 180°/с | |
| J5 | 180°/с | |
| J6 | 180°/с | |
| Максимальная скорость вращения инструмента | 2.0 м/с | |
| Номинальный крутящий момент запястного сочленения | J4 (вращение) | 31 Н.м |
| J5 (качание) | 31 Н.м | |
| J6 (вращение) | 31 Н.м | |
| Номинальный момент инерции запястного сочленения | J4 (вращение) | 1.66*10-4 кг.м2 |
| J5 (качание) | 1.66*10-4 кг.м2 | |
| J6 (вращение) | 1.66*10-4 кг.м2 |
Данная информация носит справочный характер и основывается на общих сведениях из спецификации товара. Некоторые модели роботов имеют версии исполнений и различаются по техническим параметрам.
Условия эксплуатации
- Источник питания: шкаф управления переменного тока: 220 В ± 10% 50 Гц ± 1 Гц. Постоянный ток корпуса: 48 В ± 10%
- Температура хранения: 0 ℃ -45 ℃; рабочий диапазон: 15 ℃ -25 ℃
- Относительная влажность: 20-80% относительной влажности (без образования конденсата)
- Шум: ≤ 70 дБ (А)
Приложения
КАТАЛОГ (pdf)
Другие ПРОМЫШЛЕННЫЕ РОБОТЫ